






























QYSEA Unveils World’s First "Dual DVL" ROV at Oceanology International London
2026-03-23
Share:





Oceanology International London: QYSEA Debuts World’s First "Dual DVL" Underwater Robotics Solution, Setting New Efficiency Benchmarks for High-Precision Offshore Engineering
In March 2026, Oceanology International (OI) London 2026 took place at the renowned ExCeL Centre. As the world's largest and most influential marine science and technology event, OI is often hailed as the "Olympics of the industry," bringing together over 500 leading companies from 80 countries to showcase cutting-edge breakthroughs—from deep-sea submersibles to satellite remote sensing and intelligent underwater robotics. This event serves as a critical barometer for the global offshore energy transition; here, a single technical advancement can significantly impact the safety and efficiency of subsea infrastructure thousands of miles away.
At the ExCeL exhibition hall, the QYSEA pavilion became a central hub for offshore engineering experts and energy service providers. Discussions focused on the industry's most pressing challenges, including how lightweight ROVs (Remotely Operated Vehicles) can maintain hovering precision in high-velocity currents and the practical application of U-INS navigation algorithms.

Simultaneously, at London’s Royal Victoria Dock, QYSEA concluded a successful live demonstration. During a "tug-of-war" simulation against the FIFISH X1 to mimic heavy underwater current interference, the ROV remained perfectly stationary, effectively acting as a "stabilizing needle" in the water. This demo highlighted the X1’s core capabilities: autonomous path planning (powered by U-INS inertial navigation), Non-Destructive Testing (NDT), and multi-dimensional control. In the volatile offshore environment, "certainty" has become the ultimate competitive advantage.

I. Core Technology: The World’s First "Dual DVL" Fusion Solution
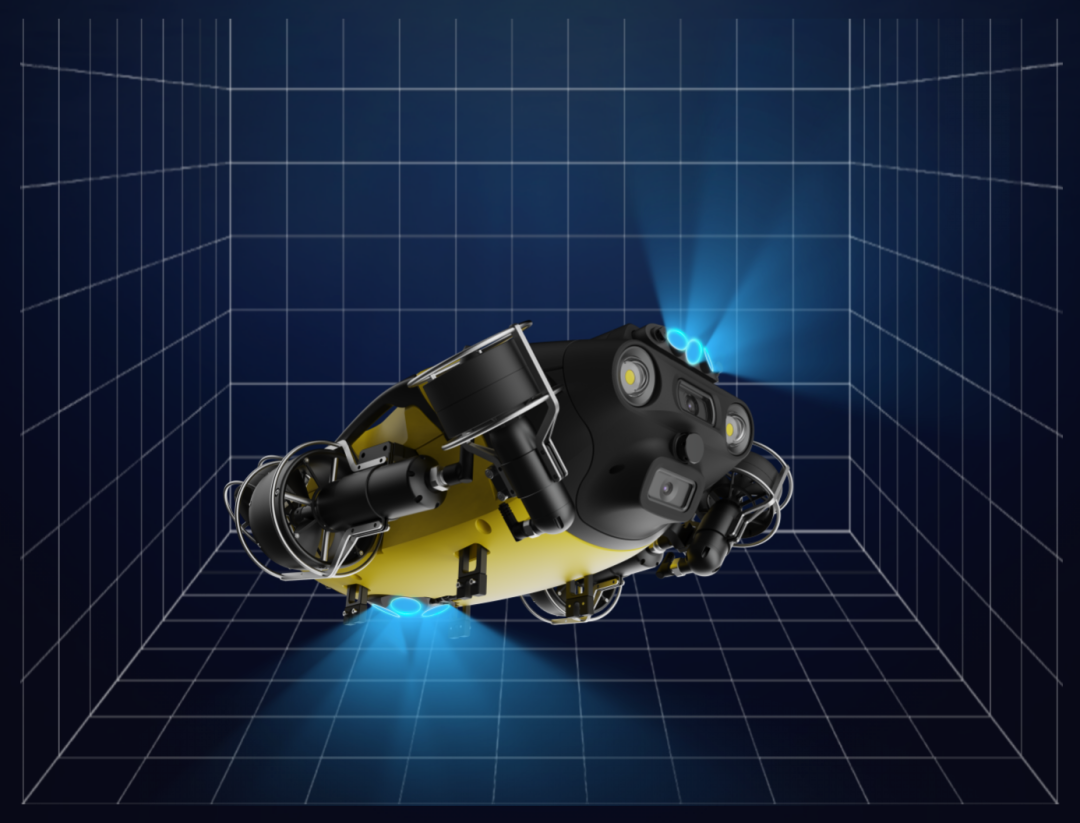
A long-standing pain point in offshore inspections is spatial positioning drift caused by a lack of seafloor features or complex turbulence. To solve this, the FIFISH X1 introduces a Dual DVL fusion solution featuring both Forward-looking Q-DVL and Downward-looking Q-DVL.
Based on the Doppler Effect, this system provides a dual Station Lock (spatial hovering) guarantee through Bottom Tracking and Surface Tracking. If environmental conditions compromise downward detection, the system automatically switches to forward-facing surface tracking to maintain position against currents. This marks the first time a closed-loop spatial positioning system has achieved full-dimensional coverage for both vertical offshore assets and complex seafloors.
Forward-looking Q-DVL: The "Positioning Anchor" for Vertical Assets. During precision inspections of wind turbine monopiles or oil and gas jackets, robots must face vertical metal surfaces for extended periods. Even under heavy lateral currents, the X1 utilizes dynamic compensation to achieve "Vertical Wall Locking". This ensures that NDT or Cathodic Protection (CP) probes remain stably attached to the inspection point, eliminating data deviations caused by drifting.
Downward-looking Q-DVL: The Three-Dimensional Anchor. In shallower waters, the downward DVL provides an absolute reference frame relative to the seabed. This grants the X1 exceptional Station Lock capabilities, allowing it to lock its 3D coordinates even in 4-knot currents (approx. 2 m/s).
II. AI-Powered Standardized Workflow: From Rapid Deployment to High-Precision Testing
Supported by full-dimensional positioning data, the X1 has evolved from manual operation to an intelligent process-driven workflow:
Rapid Mobilization: Weighing in at only 30 kg, the X1 can be transported via civil aviation, standard vehicles, or helicopters.
"Mother-Ship Independent" Deployment: By removing the need for expensive DP (Dynamic Positioning) vessels or heavy lifting equipment, a two-person team can deploy the X1 from a small Crew Transfer Vessel (CTV), reducing mobilization costs by over 60%.
U-INS Navigation & Path Planning: By fusing Q-DVL data with U-INS inertial navigation, the system corrects attitude deviations in real-time. The AI system can automatically plan and execute the optimal inspection path based on preset tasks.
Intelligent Sensor Switching: As the ROV approaches a structure, it automatically switches to Forward Q-DVL mode to avoid echo interference from complex geometries. Its Distance Lock feature ensures a constant, stable distance from the inspection surface even amidst wave surges.
4K Dual-Camera Vision: Provides high-definition, blind-spot-free video evidence for Close Visual Inspections (CVI) while maintaining awareness of the surrounding structural environment.

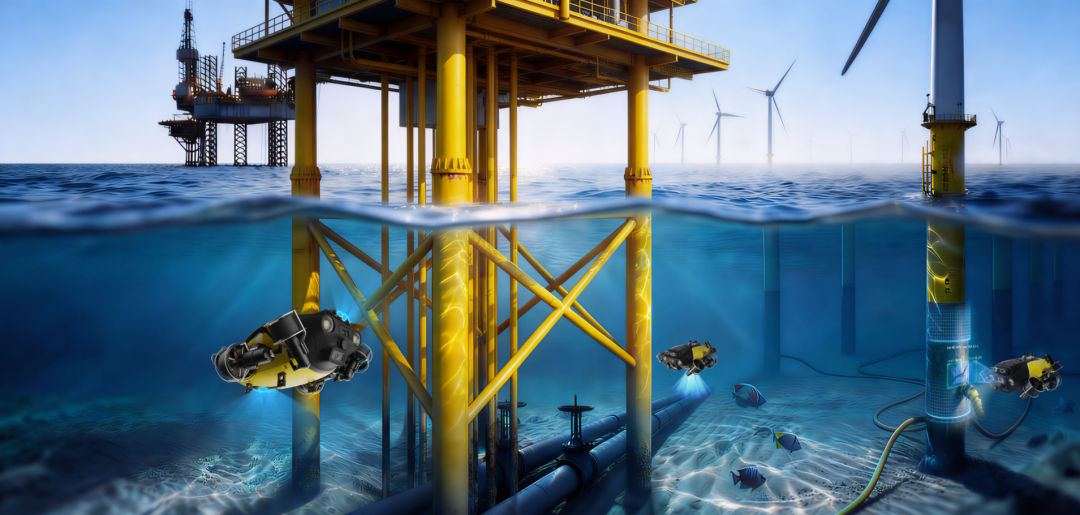
III. Industry Applications: How "Dual DVL" Redefines Commercial Value
Scenario 1: Precision Oil & Gas Jacket Inspection
The Challenge: Jacket nodes have complex geometries and are often covered in marine growth. Traditional ROVs struggle to maintain posture in narrow gaps, making high-precision NDT nearly impossible without elite pilots or massive work-class ROVs.
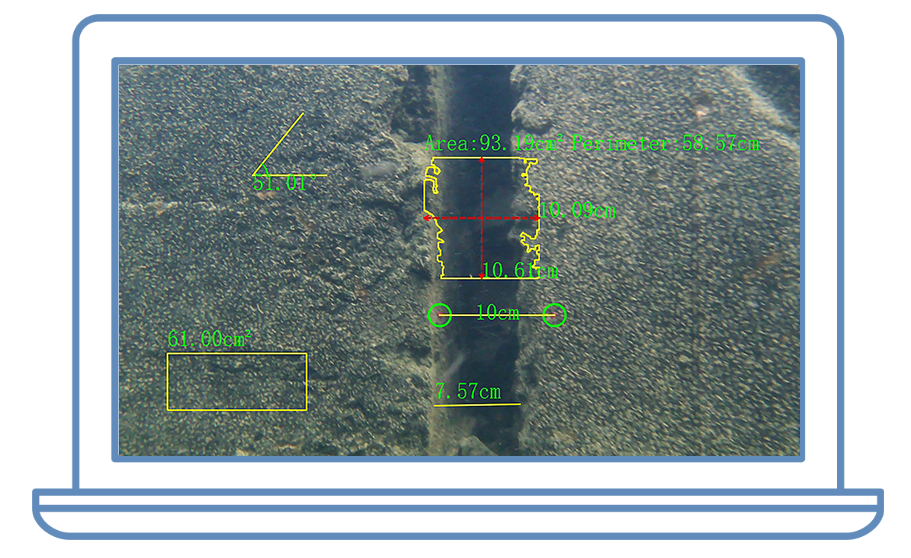
The Solution: Using Forward Q-DVL, the X1 achieves millimeter-level distance control. During the demo, the X1 used an ultrasonic thickness (UT) probe to press steadily against inspection points with AI assistance.
Value: It serves as a lightweight alternative to work-class ROVs, standardizing high-risk NDT tasks and bringing project acceptance rates close to 100%.
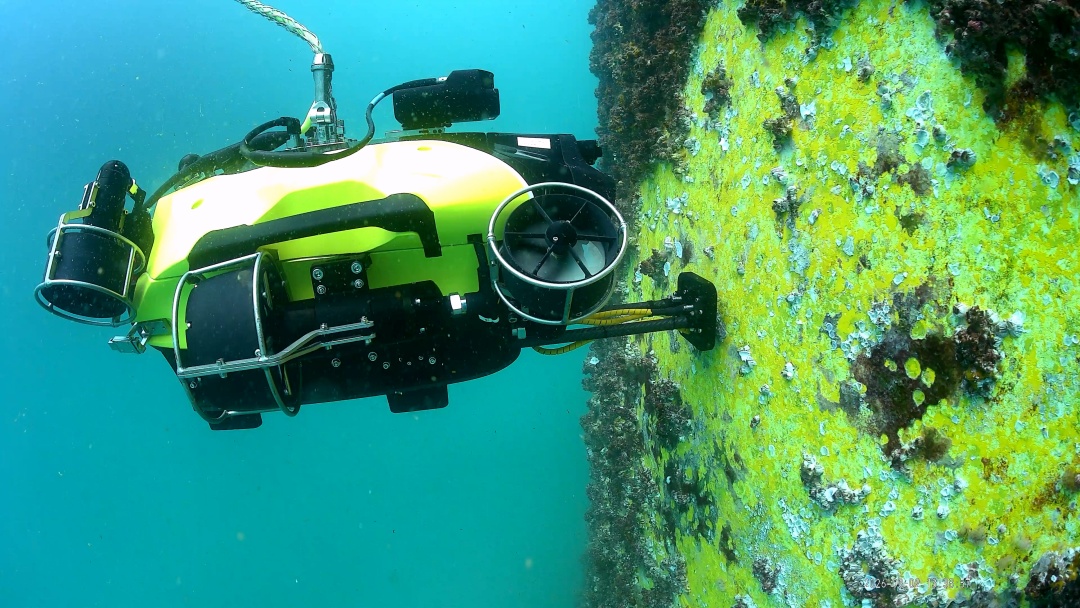
Scenario 2: Offshore Wind Monopiles – Conquering North Sea Currents
The Challenge: High flow velocities around monopiles often sweep away light ROVs, leading to frequent downtime and "weather standby" costs that can reach tens of thousands of pounds per day.
The Solution: The downward DVL locks the ground coordinates, while the forward DVL acts as a precision radar to maintain distance from the pile. This allows the X1 to perform a "perfect vertical climb" from the scour protection layer to the splash zone in 4-knot currents.
Value: Service providers can complete tasks using a small CTV before weather windows close, effectively halving mobilization costs.

Scenario 3: FPSO Hull Inspections – Ending the "Black Box" Era
The Challenge: On 300-meter-long, featureless FPSO hulls, ROVs often lose their way, leading to missed areas or redundant scans.
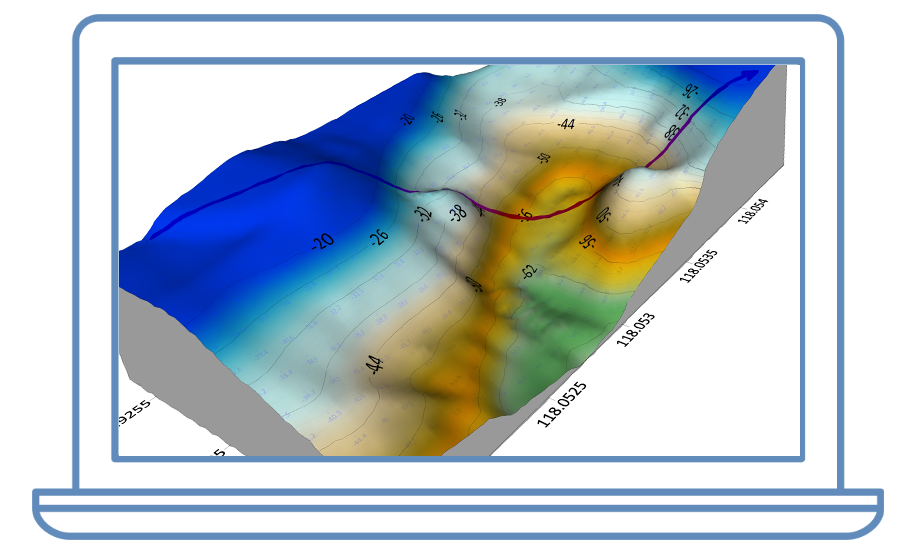
The Solution: Forward DVL creates an underwater "track" for the ROV to follow along the side of the hull, while downward DVL acts as an underwater odometer for the flat bottom. The system generates a "snake" grid path to ensure 100% coverage.
Value: This "visible certainty" reduces downtime for inspections by 40%, saving shipowners tens of thousands of dollars in lost charter fees.
Conclusion
As the demonstrations at OI London 2026 conclude, it is clear that the industry's focus has shifted toward precision and efficiency. By pioneering the integration of Dual DVL and U-INS PLUS navigation, QYSEA has transformed heavy industrial positioning capabilities into a portable, accessible tool for every operator. In the future of offshore industry, certainty is the core competency.
The exhibition may be ending, but a new era of lightweight, high-precision underwater operations has just begun.
Share:







